Verification of Emergent Behavior
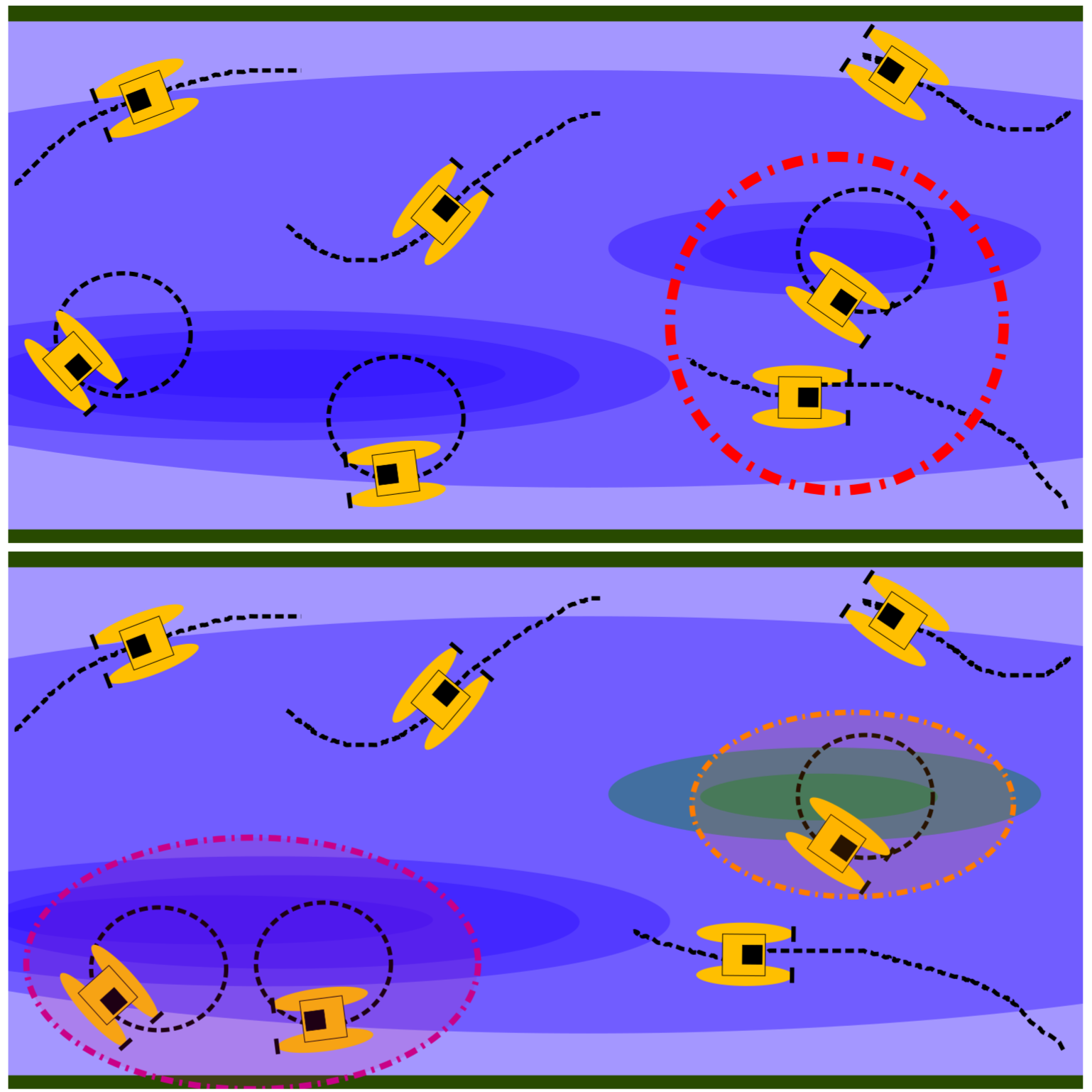
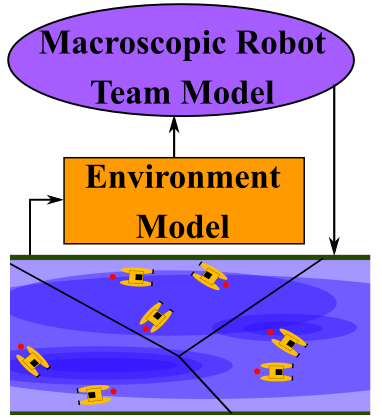
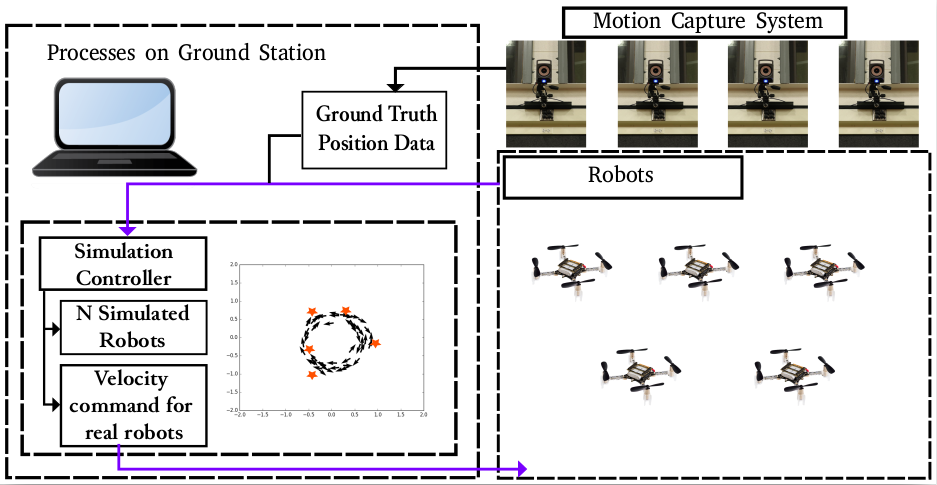
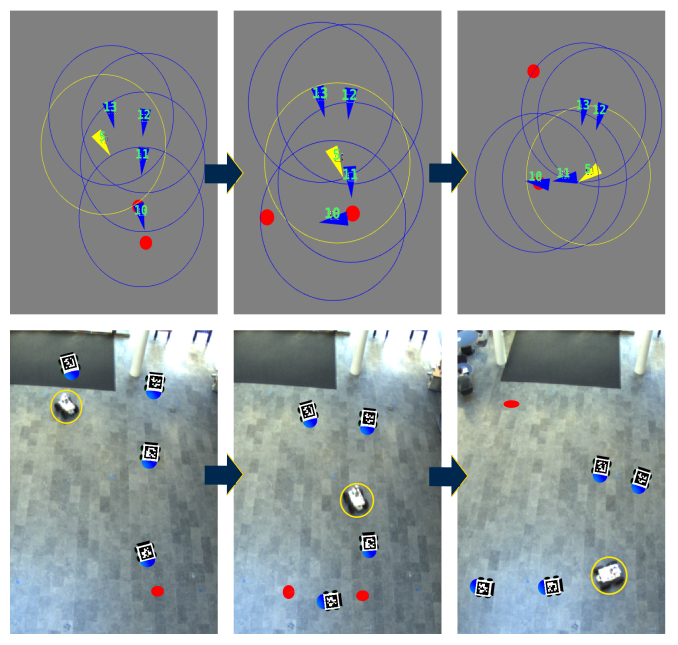
Experimental verification of swarm behaviors is challenging, one way to address this is to use mixed reality. Existing theoretical work proposes robot formations emerge from time delay between inter robot communication. Our results using the Crazyflie platform demonstrate the existence of theoretically predicted emergent behaviors